Tailor-made Manipulators and Tools
Our extensive field experience together with our in-house capability to design, manufacture and qualify advanced, customized manipulators and robotics for remote operation is a key factor for providing the service our customers need and ask for.
If you have a unique inspection challenge, please contact us to start the process. Our experience and existing tools show an impressive track record of problems solved. What we have done in the past is proof of what can be developed tomorrow and the flexibility of our portfolio in response to your unique needs.
Motion Control System - MCP

The MCP, a proprietary control system family, has been continuously developed
since its introduction in 1993. The latest generation of the MCPs is the MCP4000.
It is a four-axis control system containing a microprocessor-based motion controller,
a power supply for 4×200 W DC motors plus auxiliary systems such as cameras,
I/O units and an Ethernet switch.
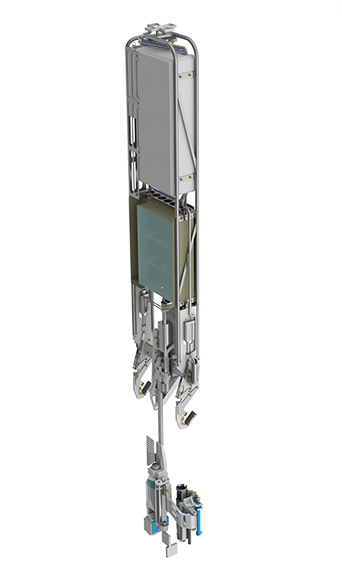
The Nemo manipulator is designed for Visual (VT), Ultrasonic (UT) & Eddy Current (ET) inspections underneath the nuclear core.

The T-crawler’s main objective is to perform Ultrasonic (UT) and Eddy current (ET) inspections of underwater welds in narrow gaps.
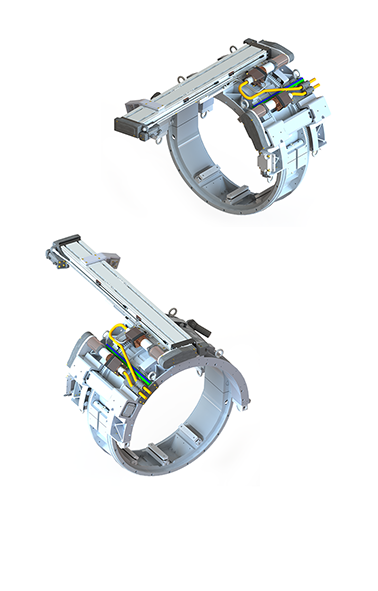
The Omnibus 360 is a toolcarrier developed to facilitate a robust and reliable frame for pipe inspections in small confined spaces with very limited direct access.
The carrier was designed to carry interchangeable End effectors for remote Visual (VT), Ultrasonic (UT), Penetrant (PT) and Replica Molding (RMT) inspections.

The UR10 robot is designed to execute penetrant testing (PT) inspections under the reactor vessel head. The PT process requires several steps which this robot handles fully remote.
The Reptilica tool is designed for Replica Molding (RMT) inspection in the thermal sleeves of a PWR reactor.

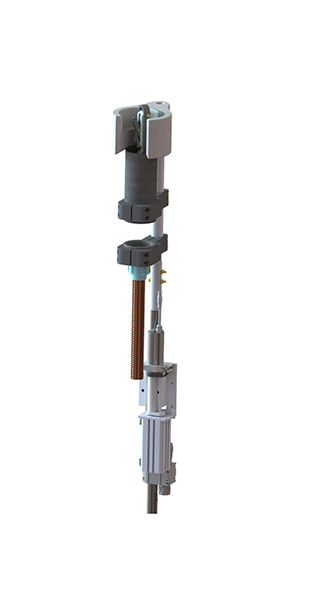
SVIP is a manipulator designed for remote Visual (VT) inspection of internal parts in nuclear power plants. The manipulator has a modular structure and can be configured for different inspection cases.